

半导体真空技术
半导体机械手是半导体设备的重要零部件之一,通常由控制器、驱动器、手臂及末端执行器等部分组成,具有高洁净度、高平稳性、高精度、高效率和高可靠性的特点。半导体机械手主要应用于半导体制造的前段工序,用于搬送、运输以及定位半导体品圆。半导体机械手种类繁多,根据运动轴数量不同,可分为单轴机械式和多轴机械手,通常情况下,运动轴数量越多。半导体机械手可实现复杂运动的能力就越大。
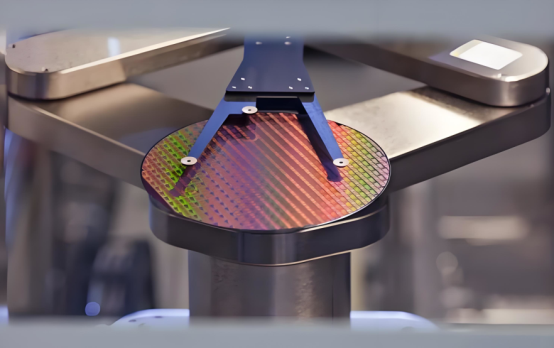
半导体传输机械手是品圆输送系统的一种典型应用。大都在有限的空间中实现晶圆的快速搬运,因此对其运动特性、反映灵敏性、运动准确性等方面,都有较高的要求。按应用环境,可分为洁净机械手和真空机械手,真空机械手一般应用在1x10-5 Pa真空环境中,除了满足洁净环境的要求外,还要求适应真空环境,结构比洁净机械手更复杂,是有高洁净度,高产能,高可靠性高重复定位精度的特点,具备 AWC 自动纠偏功能,并满足个性化设计支持用户定制。
从细分市场来看,半导体机械手可分为大气机械手和真空机械手,其中大气机械手主要用于集成电路加工过程中常压环境下晶圈的搬送:真空机械手主要用于真空环境下不同工位或工艺腔室之间的晶圆搬送:目前大气机械手市场占比达到60%以上。
半导体机械手主要适应于集成电路、芯片制 造等半导体前段工序,用来搬送晶圆。机械手是EFEM(设备前端模块)和TM(真 空传输)的核心组件,用于在抛光、刻蚀、扩散、沉积装配、包装和测试等的半 导体加工步骤中,对半导体晶片进行传输与定位。重点用于半导体工艺设备和Foundry厂等,典型应用如蚀刻机、元列似薄膜沉山心安的@消洗设备、CMP设备、离子注入机、检测设备(ATE、探针台、分选机)、涂胶显影机、晶圆片键合机、去胶设备和显影设备等。
2024-09-09 10:31
